Type of course:
Digital learning, Path
Language:
EN
Duration:
1 hour
Workload:
6 hours
Proficiency:
Advanced
Target:
Professionals, Students
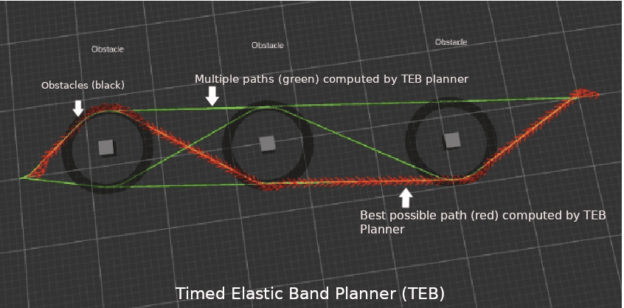
This Learning Path explains the Timed-Elastic-Band approach (TEB) that is a local trajectory planning algorithm for mobile robotics. A local trajectory planning algorithm is in charge of following a rough path planned by a global planner to drive a mobile robot to a given target, while modifying the path to respect the robot’s kinematic and dynamic constraints and avoiding dynamic obstacles. In particular, the studied implementation is a local planner plug-in for the mobile navigation framework called Navigation Stack for a more general robotics framework, Robot Operating System (ROS or ROS2 for the second version of the framework).
Learning outcomes
- The learner can embed the Timed Elastic Band planner in Navigation stack for robotic systems
- The learner can summarize the necessary libraries and files needed to run the TEB planner with ROS
- The learner can configure the basic parameters first using test_optim_node and then in simulated robot and world environment through rviz and rqt plugin
LessonTimed Elastic Band Planner - Part 2
Course Content
LessonAssessment on Timed Elastic Band
Course Content
Topics
Automation and Robotics, Automated Guided Vehicle (AGV), Robots, Robot Operating System (ROS)
Provided by
-
University of Tartu

Course Includes
- 3 Quizzes
- 1 Certificate of achievement
Related
-
 Intermediate
IntermediateAugmenting Workers
By Faculty of Engineering of University of PortoThis lesson discusses technologies that enhance human capabilities in the workplace, such as exoskeletons and augmented reality, empowering workers to perform complex tasks more efficiently and safely.
Digital learning, Lesson- Quiz1
-
 Intermediate
IntermediateHuman-Robot Collaboration for Assembly/Disassembly
By Faculty of Engineering of University of PortoThis lesson examines the integration of COBOTs (collaborative robots) in industrial processes, explaining how humans and robots can safely and efficiently work together in tasks like assembly and disassembly.
Digital learning, Lesson- Quiz1
-
 Intermediate
IntermediateIntroduction to Ethernet
By Czech Technical UniversityThis course covers the basics of Ethernet technology and its application in industrial environments, including how Ethernet integrates with PLCs and higher-level systems. Learners will discover its historical evolution, understand protocol layering, and explore best practices for reliable real-time communication.
Digital learning, Lesson- Quiz1
-
 Beginner
BeginnerRoboto programavimas regėjimo patikrinimui
By Lukasiewicz ITEEŠis robotikos mokymo kelias apima tokias temas kaip robotų tipai, jų taikymas, robotų judėjimas, komunikacijos metodai, bendradarbiavimo algoritmai ir veiklos sauga. Idealiai tinka studentams ir profesionalams, norintiems įgyti išsamų supratimą apie robotiką.
Digital learning, Path- Course Certificate
49 € -
Intermediate
Programowanie robota do inspekcji wizyjnej
By Lukasiewicz ITEETa ścieżka szkoleniowa dotycząca robotyki obejmuje takie tematy, jak rodzaje robotów, ich zastosowania, ruch robotów, metody komunikacji, algorytmy współpracy i bezpieczeństwo działania. Idealny dla studentów i profesjonalistów, którzy chcą uzyskać kompleksowe zrozumienie robotyki.
Digital learning, Path- Course Certificate
49 € -
 Intermediate
IntermediateBuild a simulated grasping application with machine learning in CoppeliaSim
By Arts et Métiers Institute of TechnologyIt explains, through learning and task nuggets, how to do a grasping application in the robotic simulator CoppeliaSim which interacts with an AI model through ROS. Finally there is a quizz nugget to assess your knowledges on these fields.
Digital learning, Path- Course Certificate
49 € -
Intermediate
Building ROS security awareness
By JOANNEUM RESEARCH - Alias RoboticsThis Learning Path explores ROS communication, Security Vulnerabilities, and Attack scenarios
Digital learning, Path- Course Certificate
49 € -
 Advanced
AdvancedMobile manipulation with ROS 2
By Czech Technical UniversityThe learner can plan and execute trajectories for mobile robots and robotic manipulators in complex environments with MoveIt 2 / ROS2.
Digital learning, Path- Course Certificate
49 € -
 Advanced
AdvancedIntroduction to manipulator simulators
By BIBAThis course presents an overview of manipulator simulators and discusses their features and limits. The learner will be acquainted to configure them and use them for exemplary small scenarios, like following or planning a trajectory.
Digital learning, Path- Course Certificate
49 € -
 Intermediate
IntermediateManipulator Motion Planning Part II
By University of TartuThe Learning Path will cover how to develop a custom Inverse Kinematics solver with Robot Operating System (ROS) and the basics of sampling-based and graphs based planners implemented in MoveIT library of ROS.
Digital learning, Path- Course Certificate
49 € -
 Beginner
BeginnerIndustrial robotics
By Czech Technical UniversityThis learning path consists of following topics: 1. Basic knowledge about cobots in the matter of differnces between industrial robots and their usage in industry 2. Safety rules of cobots
Digital learning, Path- Course Certificate
49 €