Type of course:
Digital learning, Lesson
Language:
EN
Duration:
20 minutes
Workload:
2 hours
Proficiency:
Advanced
Target:
Professionals, Students
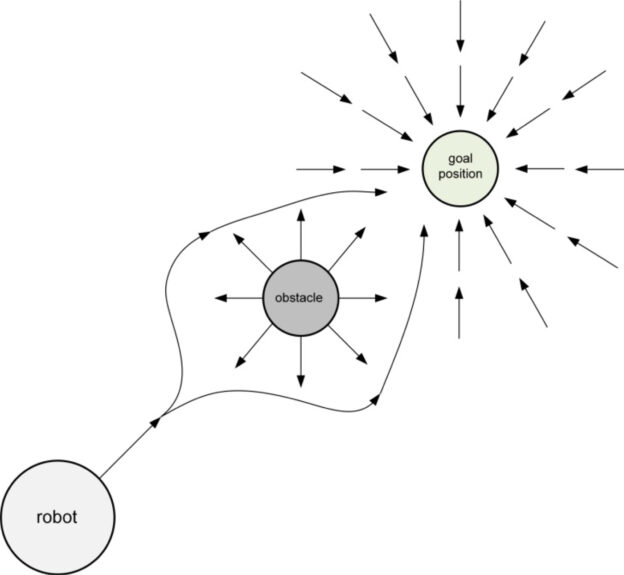
This nugget explains the Artificial Potential Field navigation method and covers the basics of reactive motion planning. The goal of this learning path is to provide a solid background in Artificial Potential Field navigation method in ROS. Through this nugget the learner will be exposed to the fundamental theory and practical issues involving the potential-field method. The code for the algorithm will be provided along with a simulation environment setup so that the learner can test the algorithm and see it in action on robots.
Learning outcomes
- Get a holistic view of artificial potential fields
- Learning by doing! - Code along the way to see potential fields in action
- Setup the simulation environment to visualize the algorithm performance on robots.
Course Content
Topics
Automation and Robotics, Digital Transformation, Automated Guided Vehicle (AGV), Robot Operating System (ROS), Simulation Tools, Navigation Systems
Provided by
-
University of Tartu

-
Institute of Science and Innovation in Mechanical and Industrial Engineering

Related
-
 Intermediate
Intermediate100- Digital Twins for Manufacturing
By SUPSIThis learning path introduces basics of Digital Twins technology for manufacturing industry processes
Digital learning, Path- Course Certificate
49 € -
 Intermediate
IntermediateDigital Twins - Virtual Commissioning
This nugget offers a deployment example within SUPSI mini-factory, through OPC-UA (Open Platform Communications – Unified Architecture).
Digital learning, Lesson -
 Intermediate
IntermediateNC machining verification by simulation of digital twin
By Czech Technical UniversityThe trainee will try to create and perform their own machining simulation in digital twin simulating software and will be assessed based on their results to confirm that they acquired needed knowledge and skills
Digital learning, Path- Course Certificate
69 € -
 Beginner
BeginnerSmart Maintenance
By University of Zagreb – FAMENAThis learning path teaches the basics of Smart Maintenance, including data collection, visualization, and data-driven decision making, ending with a knowledge assessment quiz.
Digital learning, Path- Course Certificate
69 € -
 Beginner
BeginnerRoboto programavimas regėjimo patikrinimui
By Lukasiewicz ITEEŠis robotikos mokymo kelias apima tokias temas kaip robotų tipai, jų taikymas, robotų judėjimas, komunikacijos metodai, bendradarbiavimo algoritmai ir veiklos sauga. Idealiai tinka studentams ir profesionalams, norintiems įgyti išsamų supratimą apie robotiką.
Digital learning, Path- Course Certificate
49 € -
 Advanced
AdvancedTeam Leadership
By Ruhr-University Bochum - University College Dublin - University of TartuThis LP shows the basic principles of team management. It is divided in three layers and tackles different scenarios of team management. This goes from understanding teams when it comes to creativity and innovation. But also dealing with conflicts and developing strategies for managing conflict. Lastly, the LP also addresses the topic of teams on organizational level and provides information about the structure of self-management teams along with team roles.
Digital learning, Path- Course Certificate
69 € -
Intermediate
Programowanie robota do inspekcji wizyjnej
By Lukasiewicz ITEETa ścieżka szkoleniowa dotycząca robotyki obejmuje takie tematy, jak rodzaje robotów, ich zastosowania, ruch robotów, metody komunikacji, algorytmy współpracy i bezpieczeństwo działania. Idealny dla studentów i profesjonalistów, którzy chcą uzyskać kompleksowe zrozumienie robotyki.
Digital learning, Path- Course Certificate
49 € -
 Intermediate
IntermediateSäästva innovatsiooni kontseptsioonid ja väljakutsed
By INESC TEC - Faculty of Engineering of University of Porto - Politecnico di TorinoAlustage meie lühikese veebikursusega "Jätkusuutliku innovatsiooni kontseptsioonid ja väljakutsed", et avastada jätkusuutliku innovatsiooni dünaamilist maastikku. Selles põhjalikus õppesuunas süvenete tehnoloogilise arengu, uute toodete ja lahenduste arendamise ning jätkusuutlike tootmistavade hädavajalikkuse keerulisse koosmõjusse.
Digital learning, Path- Course Certificate
69 € -
Intermediate
Concetti e sfide dell'innovazione sostenibile
By INESC TEC - Faculty of Engineering of University of Porto - Politecnico di TorinoIntraprendete un viaggio alla scoperta del paesaggio dinamico dell'innovazione sostenibile con il nostro breve corso online "Concetti e sfide dell'innovazione sostenibile". In questo percorso di apprendimento completo, approfondirete l'intricata interazione tra il progresso tecnologico, lo sviluppo di nuovi prodotti e soluzioni e l'imperativo di pratiche di produzione sostenibili.
Digital learning, Path- Course Certificate
69 € -
Beginner
Conceitos e Desafios da Inovação Sustentável
By INESC TEC - Faculty of Engineering of University of Porto - Politecnico di TorinoEmbarque numa viagem de descoberta através da paisagem dinâmica da inovação sustentável com o nosso curso online de curta duração, "Conceitos e Desafios da Inovação Sustentável". Neste percurso de aprendizagem abrangente, irá mergulhar na intrincada interação entre o avanço tecnológico, o desenvolvimento de novos produtos e soluções e o imperativo de práticas de fabrico sustentáveis.
Digital learning, Path- Course Certificate
69 € -
Beginner
Concepts and challenges of Sustainable Innovation
By INESC TEC - Faculty of Engineering of University of PortoEmbark on a journey of discovery through the dynamic landscape of sustainable innovation with our short online course, "Concepts and Challenges of Sustainable Innovation." In this comprehensive learning path, you will delve into the intricate interplay between technological advancement, new product and solution development, and the imperative for sustainable manufacturing practices.
Digital learning, Path- Course Certificate
69 € -
 Advanced
AdvancedOrganizing and Boosting trainings for professionals
By Faculty of Engineering of University of Porto - Faculty of Engineering of University of Porto - University of TartuThe TURING methodology will promote personalised and flexible digital enhancement training programmes, co-created with digital technology providers, companies adopting those technologies and their mature established customers that use similar technologies. This course addresses concepts and methods related to Organising co-creation labs and Organising internships (including training the mentors).
Digital learning, Path- Course Certificate
69 €