Type of course:
Digital learning, Lesson
Language:
EN
Duration:
20 minutes
Workload:
2 hours
Proficiency:
Intermediate
Target:
Professionals
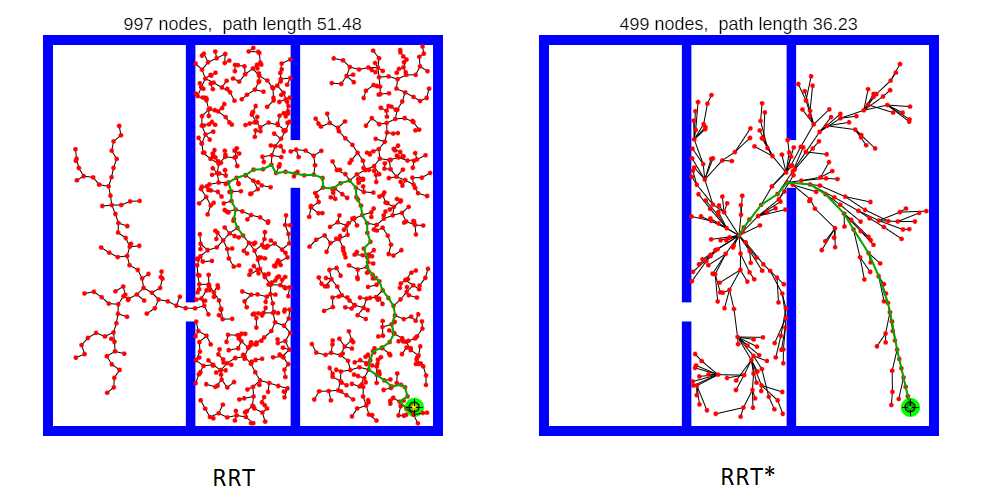
This nugget will discuss popular sampling-based algorithms for robotics motion planning. Motion planning is the problem of finding a collision-free path for a robot to move from one point to another in an environment. Sampling-based methods such as Rapidly-exploring random trees (RRT) and probabilistic roadmaps (PRM) will be discussed.
Learning outcomes
- The learner is able to describe the main features of sampling-based planning methods, such as RRT and PRM.
- The learner is able to explain the advantages and disadvantages of sampling-based methods.
- The learner is able to apply sampling-based methods to solve motion planning problems.
Course Content
Topics
Automation and Robotics, Robot Operating System (ROS)
Provided by
-
University of Tartu

-
University of Tartu
Related
-
 Beginner
BeginnerRoboto programavimas regėjimo patikrinimui
By Lukasiewicz ITEEŠis robotikos mokymo kelias apima tokias temas kaip robotų tipai, jų taikymas, robotų judėjimas, komunikacijos metodai, bendradarbiavimo algoritmai ir veiklos sauga. Idealiai tinka studentams ir profesionalams, norintiems įgyti išsamų supratimą apie robotiką.
Digital learning, Path- Course Certificate
49 € -
Intermediate
Programowanie robota do inspekcji wizyjnej
By Lukasiewicz ITEETa ścieżka szkoleniowa dotycząca robotyki obejmuje takie tematy, jak rodzaje robotów, ich zastosowania, ruch robotów, metody komunikacji, algorytmy współpracy i bezpieczeństwo działania. Idealny dla studentów i profesjonalistów, którzy chcą uzyskać kompleksowe zrozumienie robotyki.
Digital learning, Path- Course Certificate
49 € -
 Intermediate
IntermediateBuild a simulated grasping application with machine learning in CoppeliaSim
By Arts et Métiers Institute of TechnologyIt explains, through learning and task nuggets, how to do a grasping application in the robotic simulator CoppeliaSim which interacts with an AI model through ROS. Finally there is a quizz nugget to assess your knowledges on these fields.
Digital learning, Path- Course Certificate
-
Intermediate
Building ROS security awareness
By JOANNEUM RESEARCH - Alias RoboticsThis Learning Path explores ROS communication, Security Vulnerabilities, and Attack scenarios
Digital learning, Path- Course Certificate
49 € -
 Advanced
AdvancedMobile manipulation with ROS 2
By Czech Technical UniversityThe learner can plan and execute trajectories for mobile robots and robotic manipulators in complex environments with MoveIt 2 / ROS2.
Digital learning, Path- Course Certificate
49 € -
 Advanced
AdvancedIntroduction to manipulator simulators
By BIBAThis course presents an overview of manipulator simulators and discusses their features and limits. The learner will be acquainted to configure them and use them for exemplary small scenarios, like following or planning a trajectory.
Digital learning, Path- Course Certificate
49 € -
 Intermediate
IntermediateManipulator Motion Planning Part II
By University of TartuThe Learning Path will cover how to develop a custom Inverse Kinematics solver with Robot Operating System (ROS) and the basics of sampling-based and graphs based planners implemented in MoveIT library of ROS.
Digital learning, Path- Course Certificate
49 € -
 Beginner
BeginnerIndustrial robotics
By Czech Technical UniversityThis learning path consists of following topics: 1. Basic knowledge about cobots in the matter of differnces between industrial robots and their usage in industry 2. Safety rules of cobots
Digital learning, Path- Course Certificate
49 € -
 Advanced
AdvancedAutonomous mobile robotics - Multi-Agent-Control
By BIBAThis Learning Path enables the learner to distinguish control architectures for a multi-agent system and classify the introduced frameworks based on ROS2 for the control of a number of mobile autonomous robots.
Digital learning, Path- Course Certificate
49 € -
 Advanced
AdvancedAutonomous mobile robotics - Dynamic Window Approach
By Czech Technical UniversityThis Learning Path enables the learner to use and configure the Dynamic Window Approach as local planner algorithm in ROS2 Navigation Stack.
Digital learning, Path- Course Certificate
49 € -
 Advanced
AdvancedAutonomous mobile robotics - Model Predictive Control
By BIBAThis Learning Path enables the learner to summarize the Model Predictive Control scheme concept and configure it as a local planner algorithm in ROS2 for a mobile robot.
Digital learning, Path- Course Certificate
49 € -
 Intermediate
IntermediateRoboto komunikacija
By Lukasiewicz ITEENaudojant aiškias diagramas ir blokines schemas, išsamius įvairių tipų signalų veikimo pramoninėje praktikoje aprašymus, pramoninių magistralinių sistemų santraukas su jų funkcijomis ir apribojimais, realius pavyzdžius, iliustruojančius mašinų ryšių diegimą gamybinėje aplinkoje, ir interaktyvias užduotis, skirtas įgytoms žinioms pritaikyti praktiškai, medžiagoje pateikiama visapusiška pagalba suprantant sudėtingas mašinų ryšių ir pramoninių tinklų sąvokas.
Digital learning, Lesson