Environment setup for ROS2
This nugget will show you how to prepare your environment in order to use the Robot Operating System version 2, ROS2.
This nugget will show you how to prepare your environment in order to use the Robot Operating System version 2, ROS2.
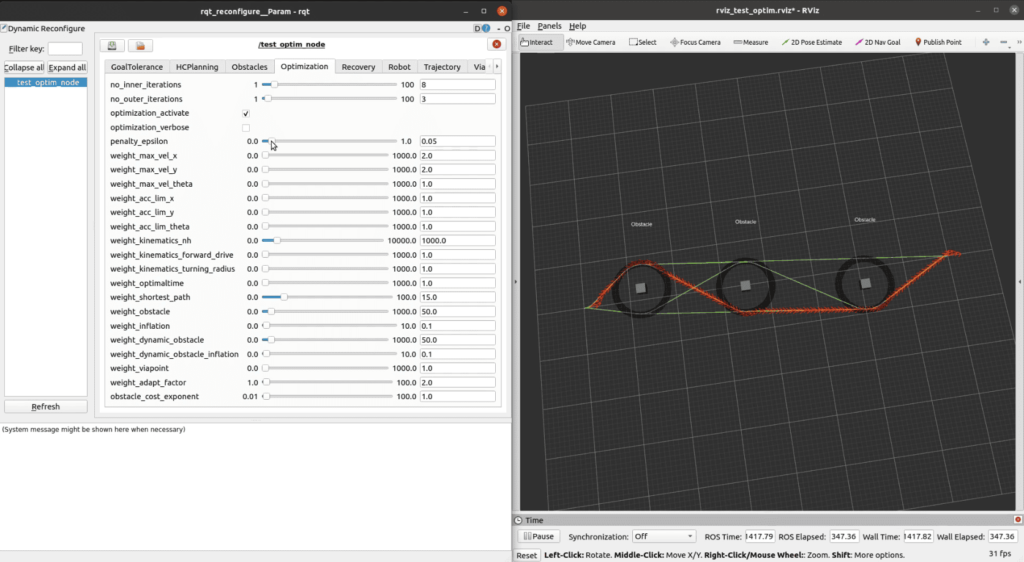
This nugget describes what and how to tune the parameters related to the Timed Elastic Band Planner in ROS. Requirements are that the TurtleBot robot…
This nugget will present you how to use ROS2/Navigation2, also called ROS2 Navigation Stack, a framework for mobile robot navigation, on a simulated robot and…

Questo pacchetto esteso si basa sulle conoscenze fondamentali introdotte nel precedente pacchetto “Adozione di nuove tecnologie”, con un focus specifico sull’adozione di nuove tecnologie all’interno…

Esta pepita serve como uma exploração abrangente da abordagem do Produto Mínimo Viável (MVP), com o objetivo de equipar os participantes com uma compreensão profunda…

Esta pepita fornece uma exploração concisa mas abrangente do papel fundamental que a indústria transformadora desempenha como motor da mudança tecnológica, económica e social. Sublinha…
O nugget foi projetada para fornecer uma compreensão abrangente da difusão de inovações e do processo de adoção de novas tecnologias, com foco particular em…

See õppetükk avaneb erinevate tööviiside põhjaliku uurimisena, süvenedes traditsioonilistesse hierarhilistesse mudelitesse, koostööl põhinevasse meeskonnatöösse ja agiilsetesse metoodikatesse. Osalejad osalevad arutelus ja analüüsis, lihvides oma võimet…

Uno dei pilastri della Creatività Applicata è la capacità di pensare in termini di possibilità. Quando la conoscenza e l’esperienza sono insufficienti, i programmi di…

Questo nugget presenta i processi e gli strumenti utilizzati dagli imprenditori e nell’apprendimento imprenditoriale, per la sperimentazione e la convalida di ipotesi che riducono l’incertezza…