An introduction of frameworks for Multi-Agent-Control of autonomous mobile Robots in ROS
This nugget introduces exemplary frameworks based on ROS2 to handle a multi-agent system, which could be applied to a number or swarm of distributed autonomous…
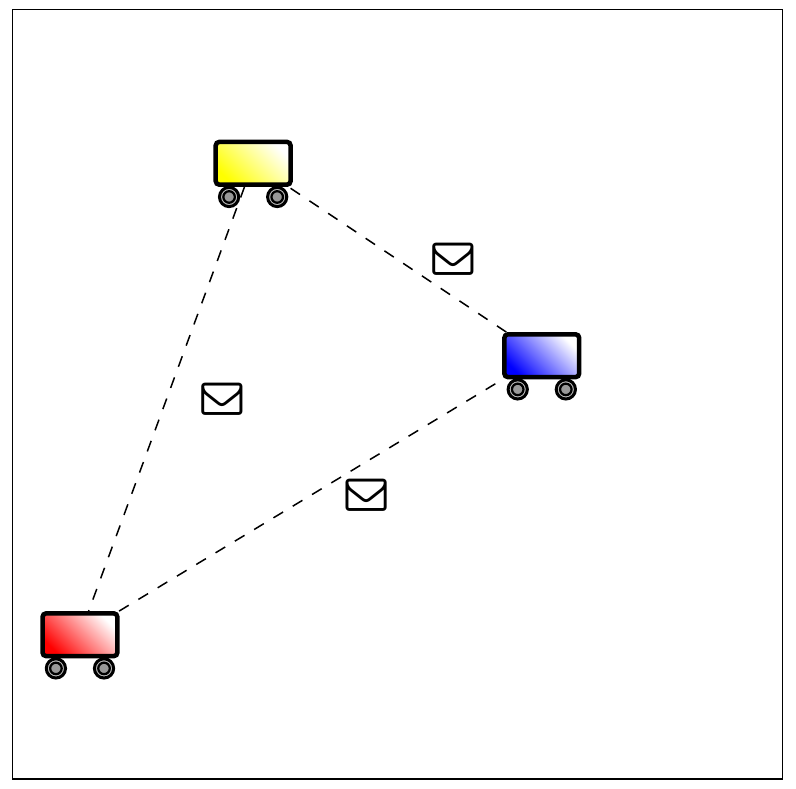
This nugget introduces exemplary frameworks based on ROS2 to handle a multi-agent system, which could be applied to a number or swarm of distributed autonomous…
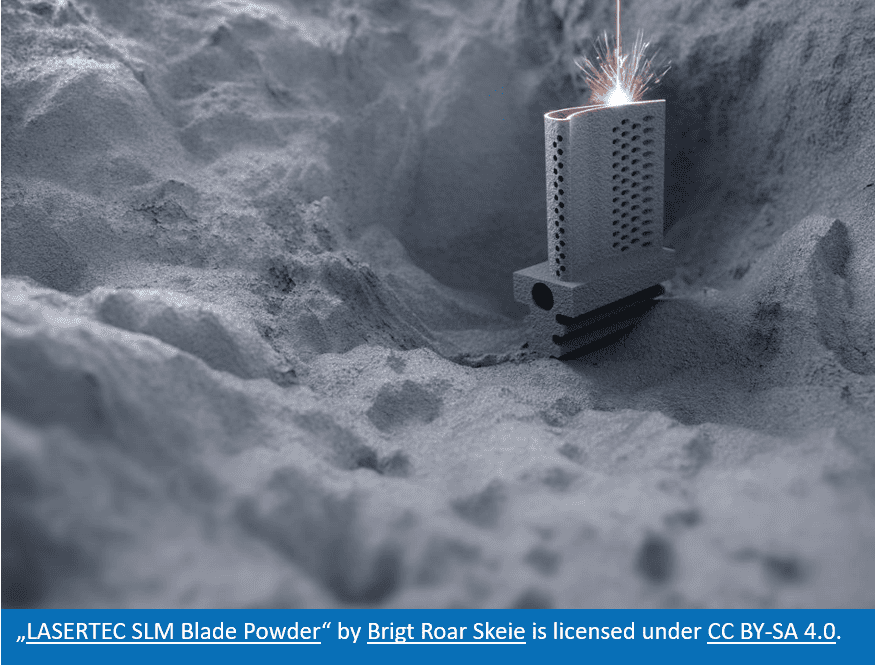
This nugget provides the introductory information for the learning of Additive Manufacturing general introduction for Additive Manufacturing Design Professionals.
This nugget provides the learner some general information about the set of tools for mobile robot navigation in ROS2 (Robot Operating System) called Navigation2 or…

Tn this learning nugget, the idea of Protected Grounds is explored in the context of equality. Protected Grounds are enshrined in EU and National legislation.…
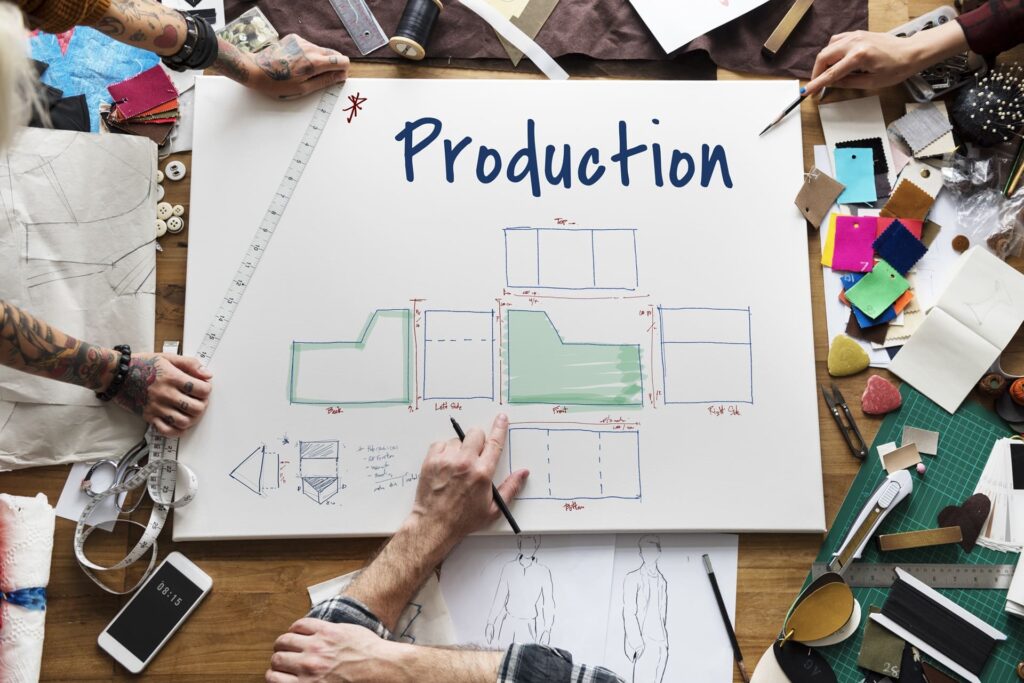
This nugget covers the steps that should be followed in the design of a new product. Additionally, shows how to use TinkerCAD, a free and…
Besimokantysis susipažįsta su trimis pagrindiniais skaitmeninių dvynių dimenionais su jų naudojimo praktikoje pavyzdžiais.
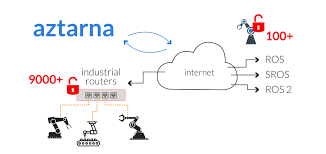
This nugget will provide the basic learning resources for diving into ROS related security audits and will demonstrate several tools for the purpose. On this…

Ovaj segment će upoznati korisnike sa RangeVision Spectrum 3D skenerom. Obuhvatiće brzo postavljanje 3D skenera i razumevanje teorijskih principa tehnologije koja se koristi u ovom…
In this nugget the robot control framework for the Robot Operating System (ROS), ros2_control, is explained and an example of how to use ros2_control controllers…
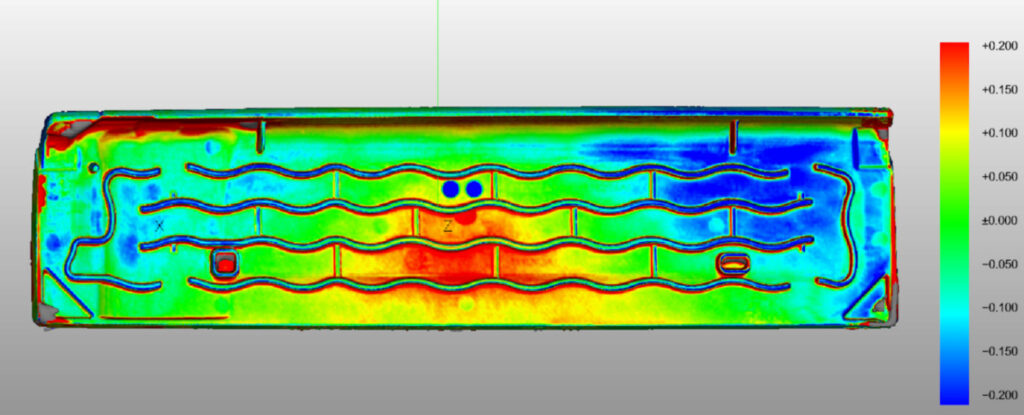
3D scanning metrology is the process of acquiring highly accurate physical 3D measurements of an object, which can be analyzed or retro-engineered. It is based…