Drehscheibe-Scannen mit 3D-Scanner
3D-Scans mit Drehtisch sind ein effizienter Prozess und eine bevorzugte Methode für kleinere Objekte mit komplexer Geometrie. In diesem Lernnugget werden die Vorteile des strukturierten…

3D-Scans mit Drehtisch sind ein effizienter Prozess und eine bevorzugte Methode für kleinere Objekte mit komplexer Geometrie. In diesem Lernnugget werden die Vorteile des strukturierten…

SUMMARY Replace this text by writing here a summary of the course you are creating. Consider that the users will read the short description of…
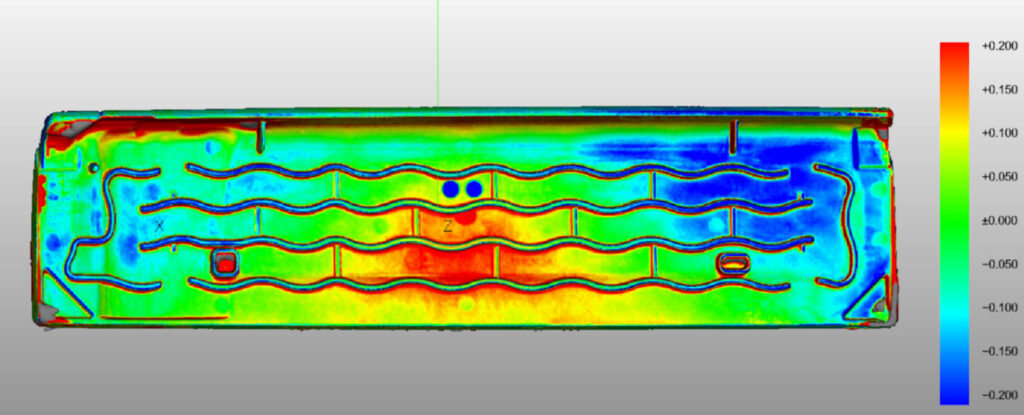
Metrologija 3D skeniranja je proces dobivanja visoko preciznih fizičkih 3D mjerenja objekta, koji se mogu analizirati ili retro inženjerski prilagođavati. Bazira se na uspoređivanju dimenzija…
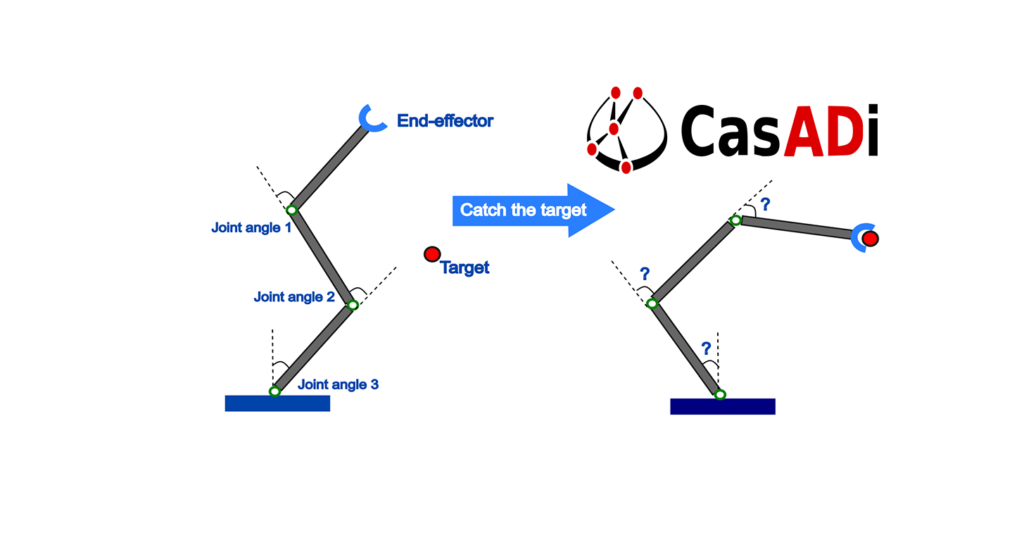
This nugget will introduce you to Implementing an Inverse Kinematics Solver from scratch using an off-the-shelf optimization solver called IPOPT and modelling forward kinematics based…
This nugget gives the theoretical background of the Dynamic-Window-Approach algorithm used as local planner in mobile robotics. It then explains what are the important parameters…
This nugget presents the main components of the Model Predictive Control Scheme and how an Optimal Control Problem for a differential-drive robot can be formulated.

In this nugget you’ll learn what can go wrong on ROS and robotic applications tampered with cyberattacks and find out more on:The basics of ROS…
This nuggets provides information on the cost structure and cost drivers in Additive Manufacturing. It describes cost models to enable the learner to estimate costs,…
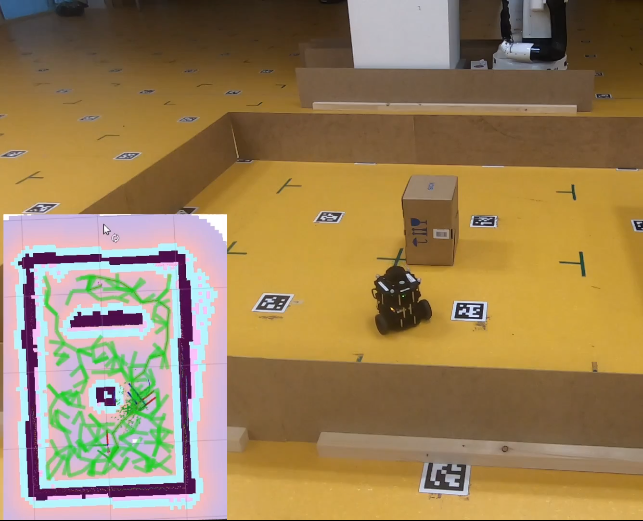
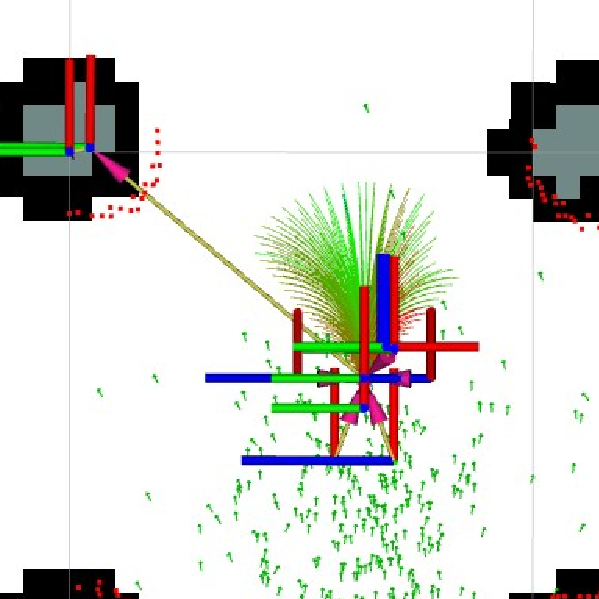
This nugget teaches the learner how to implement a global planner for ROS2 Navigation2 with the practical hands-on example of the implementation of the Rapidly-exploring…
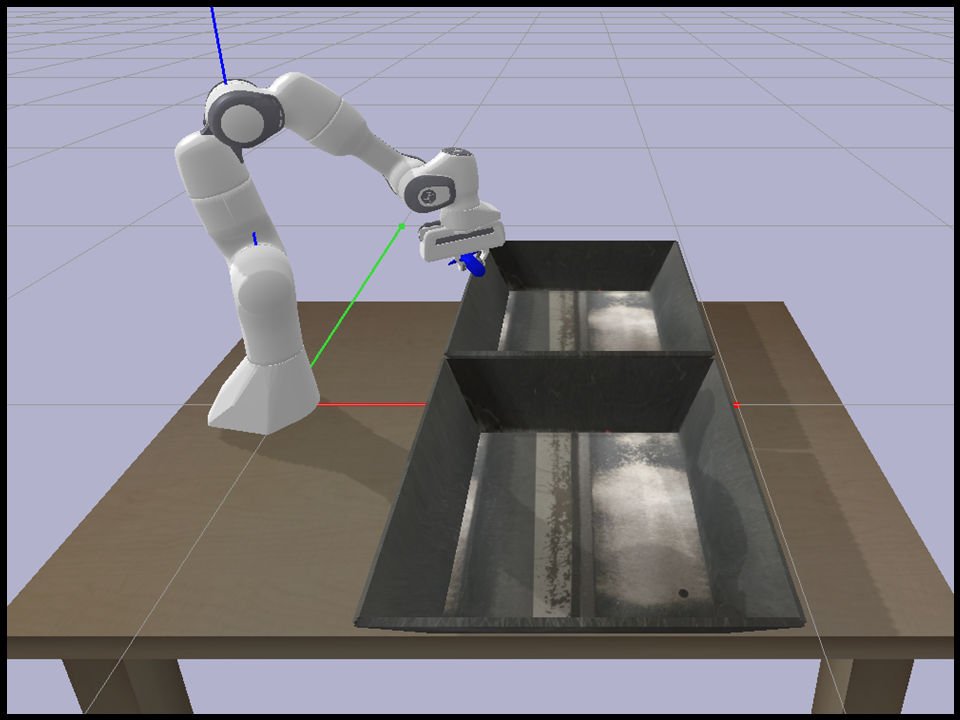
This nugget will introduce the PyBullet Python module for robotics simulation. In an example, you will learn to simulate the Franka Emika Panda robot in…