Mobile manipulation with ROS 2
This learning path will teach the learner to use an existing robot configuration for MoveIt 2 / ROS 2. The learner will be able to…
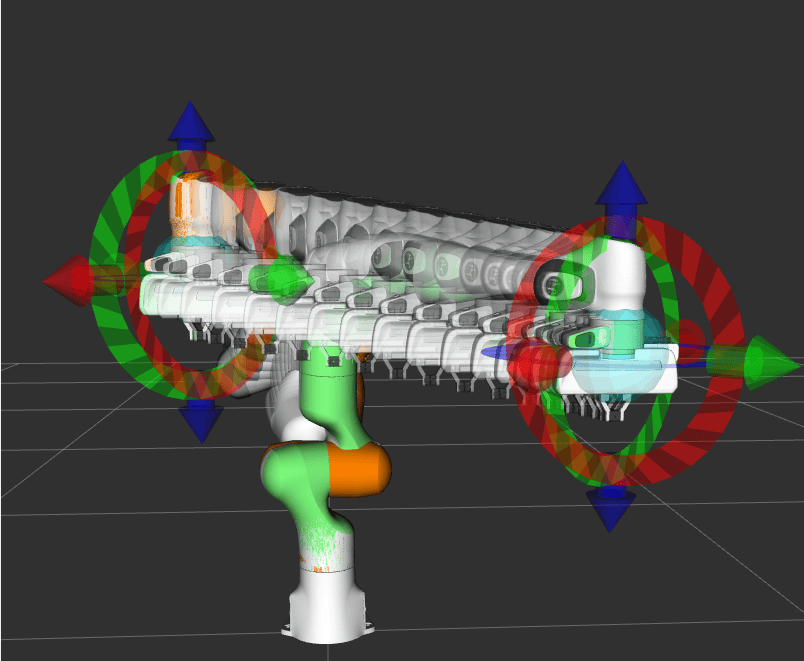
This learning path will teach the learner to use an existing robot configuration for MoveIt 2 / ROS 2. The learner will be able to…
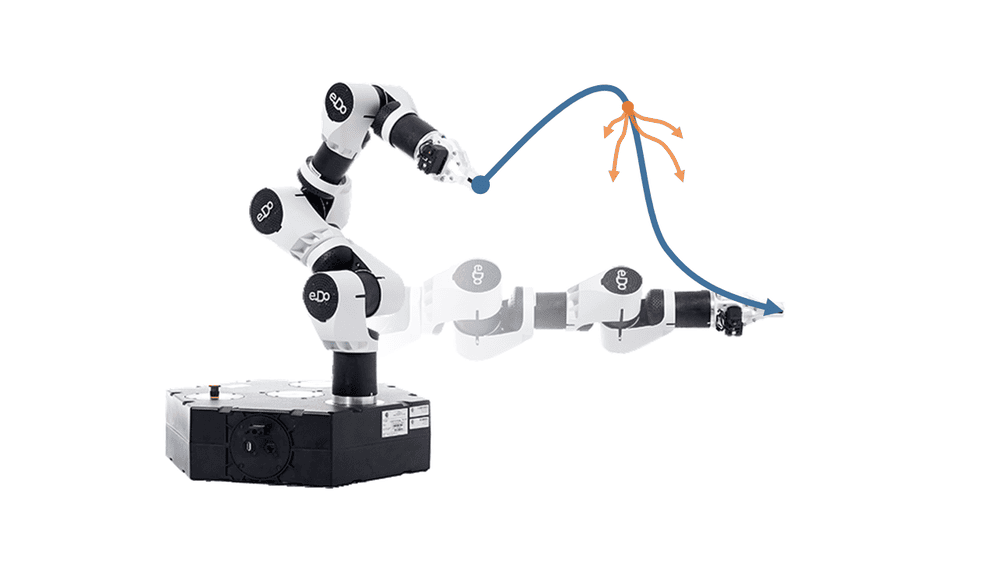
This course presents an overview of manipulator simulators compatible with ROS. It will illustrate the capabilities and limits of such simulators and present examples such…
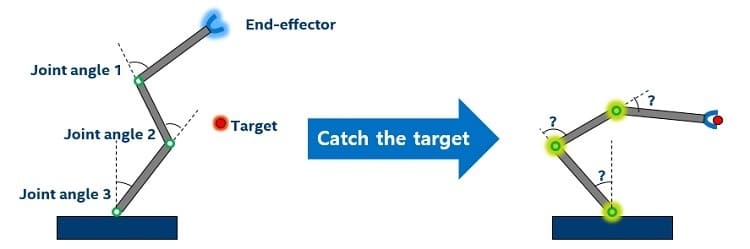
This Learning Path will build on Manipulator Motion Planning I and cover some technical concepts. The associated nuggets will cover1. Implementing an Inverse Kinematics Solver…

This Learning Path allows student to learn about the following topics: 1. Cobot comparison with industrial robots – workplace, usage, automation, programming2. Safety of cobots…
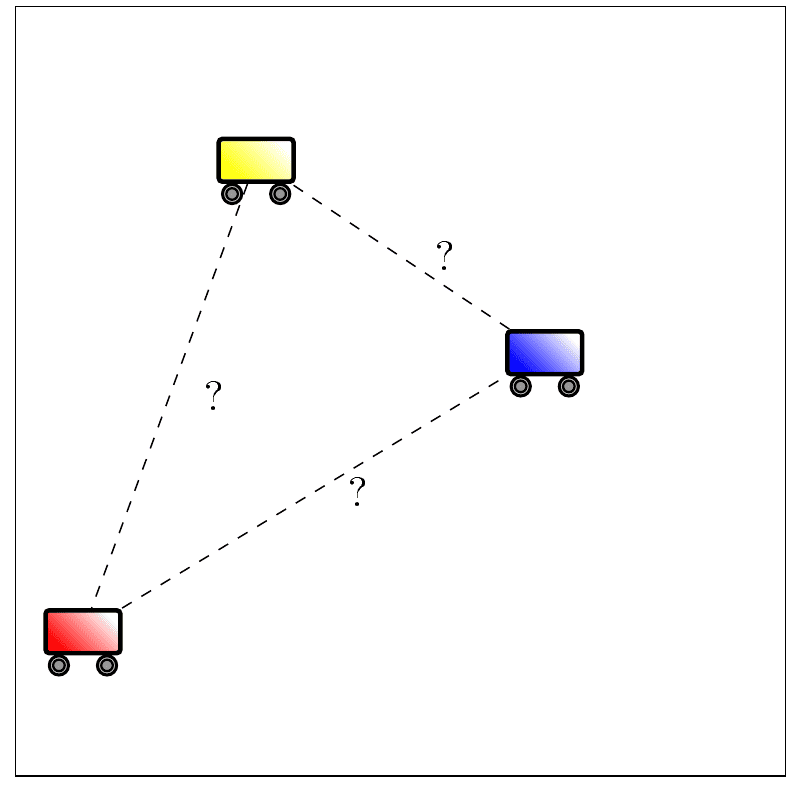
This Learning Path introduces the different concepts and architectures for Multi-Agent-Control algorithms for autonomous mobile robots. The theoretical concepts are presented, and some frameworks as…
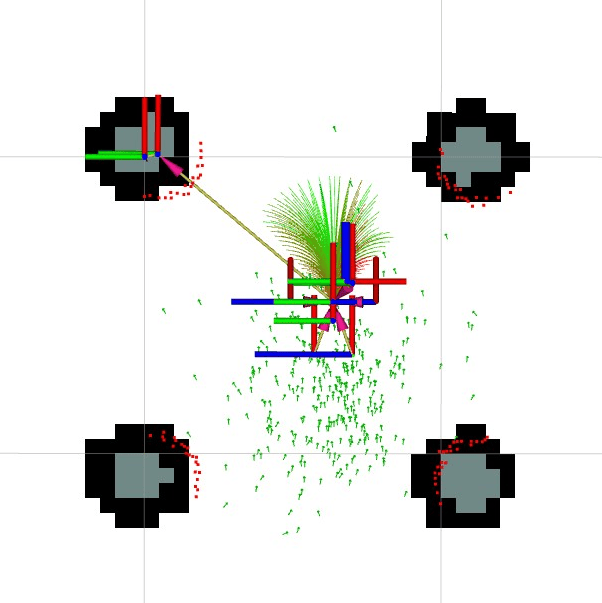
This Learning Path introduces the Dynamic Window Approach used as local planner algorithm in ROS2 Navigation Stack. It will provide the learner with some theoretical…
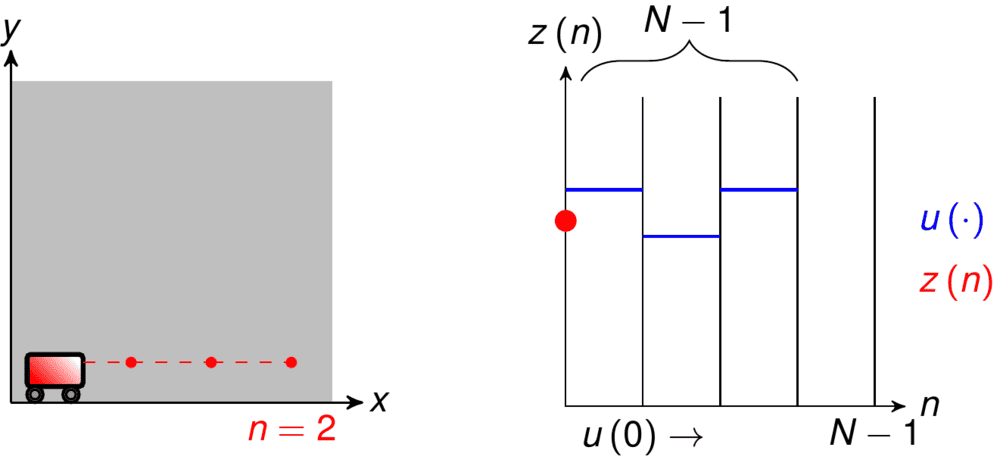
This Learning Path introduces the Model Predictive Control (MPC) approach used as a local planner algorithm in ROS2. The main components of the MPC scheme…
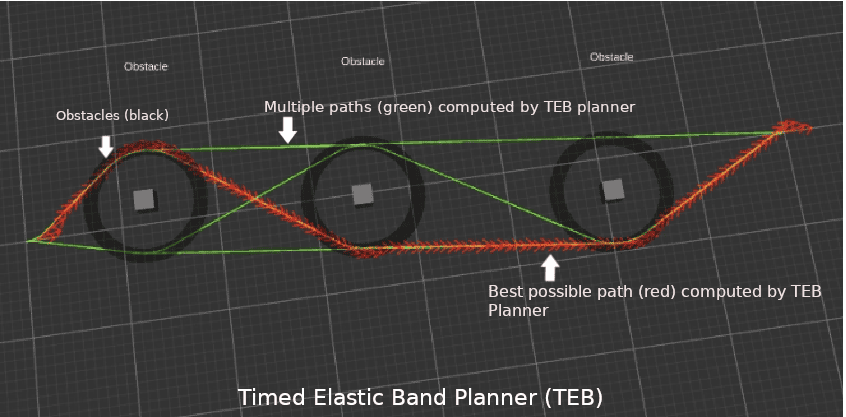
This Learning Path explains the Timed-Elastic-Band approach (TEB) that is a local trajectory planning algorithm for mobile robotics. A local trajectory planning algorithm is in…
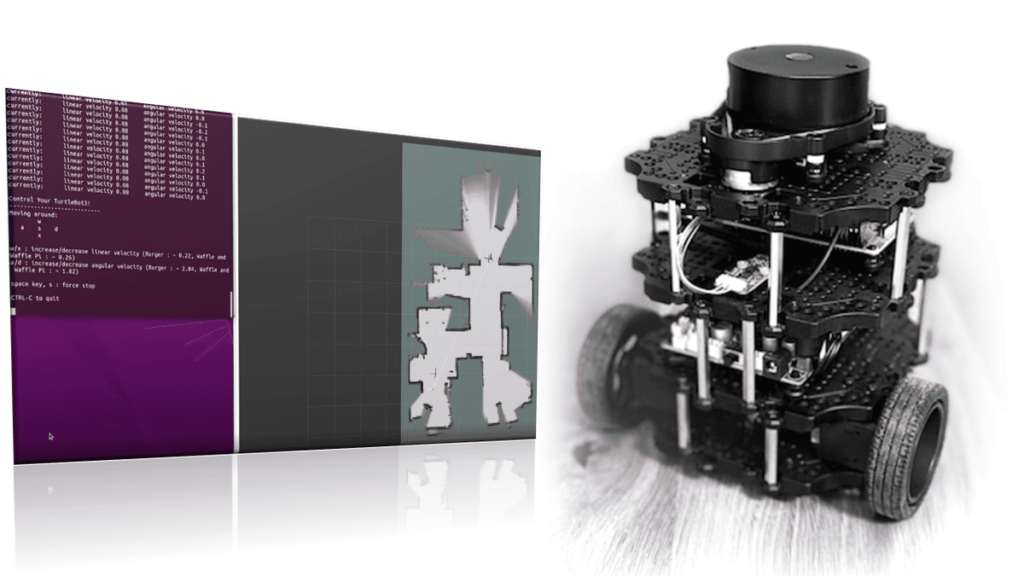
This Learning Path introduces the Navigation Stack of the Robot Operating System ROS2 to teach the learner how to configure, install and set up ROS2…
This Learning Path introduces the learner to the second version of the Robot Operating System, ROS2. Especially ROS1 users will be presented the new features…